Электродвигатель – устройство, которое занимается преобразованием электроэнергии в механическую. Он работает, используя принцип электромагнитной индукции.В последнее время он все сильнее популяризируется на автомобильном рынке в качестве перспективного направления развития автопромышленности. Поэтому есть смысл подробнее ознакомиться с устройством электромобиля, его двигателя, за которым может быть будущее отрасли.
Принцип работы и устройство
Электродвигатель включает в себя статор и ротор. Вращающееся магнитное поле в статоре действует на обмотку ротора и наводит в нём ток индукции, возникает вращающий момент, который приводит в движение ротор. Электроэнергия, поступающая на обмотки мотора, преобразуется в механическую энергию вращения.
Благодаря развитию технологии электродвигатели нашли применение в разных отраслях, например, автомобилестроении. Причем они способны использоваться либо отдельно, либо совместно с (ДВС). Последний вариант – гибридные авто.
От электродвигателей, применяемых на производствах, агрегат для авто отличается малыми габаритами, но повышенной мощностью. К тому же современные разработки все больше отдаляют двигатели для автомобилей от иных подобных устройств. Характеристиками электромобилей являются не только показатели мощности, крутящего момента, но и частота вращения, ток и напряжение. Поскольку от этих данных зависит передвижение и обслуживание авто.
Виды
Чтобы лучше разобраться в многообразии, которое нам дарит авторынок, стоит рассмотреть существующие виды электродвигателей для электромобилей.
Их можно условно классифицировать по типу тока:
- устройства переменного тока;
- конструкции постоянного тока;
- решения универсального образца (способны функционировать от постоянного и переменного тока).
Появление силовых транзисторов на токи порядка десятков и сотен ампер способствовало разработке ряда вариантов тяговых электроприводов с транзисторными силовыми преобразователями в цепи якоря двигателя постоянного тока с независимым возбуждением. Типичными для этого направления являются работы французской фирмы «Рагоно» и американских - «Дженерал Электрик» и «Крайслер».
Фирмой «Рагоно» создан электропривод для й полной массой около 1200 кг, причем в качестве опытных образцов использовались конвертированные автомобили «Рено 5Л (Reno-ult 5L»). Привод осуществляется от двигателя номинальной мощностью 6 кВт при номинальной частоте вращения 5000 мин-1 и напряжении 96 В. В схеме электропривода предусмотрено два транзисторных импульсных преобразователя. Силовой преобразователь в цепи якоря состоит из параллельного соединения 11 групп по три транзистора в каждой. При номинальном токе якоря двигателя 75 А и кратности максимального тока около 4 А максимальная токовая нагрузка на транзистор не превышает 10 А. Каждая группа транзисторов снабжена защитной индуктивностью и обратным диодом. Силовой преобразователь работает с постоянной частотой коммутации 700 Гц и обеспечивает изменение относительной длительности импульсов выходного напряжения от 0,05 до 1. Регулирование скорости по возбуждению осуществляется до максимальной частоты вращения 7000 мин-1 с помощью транзисторного преобразователя, рассчитанного на изменение тока возбуждения от 2 до 8 А при постоянной частоте коммутации 1000 Гц.
Рис. 3.5. Схема электропривода электромобиля ETV-1 с транзисторным преобразователем фирмы «Дженерал электрик»
Принципиальная схема электропривода, разработанного фирмой «Дженерал Электрик» для экспериментального электромобиля ETV-1 фирмы «Крайслер», показана на рис. 3.5. По общей структуре этот электропривод близок к варианту двухзонного регулирования, приведенному на рис. 3.3. Двигатель постоянного тока независимого возбуждения М питается от тяговой батареи GB через силовой преобразователь цепи якоря. Обмотка возбуждения ОВ получает питание через преобразователь возбуждения ПВ.
Главной отличительной особенностью является использование мощных силовых транзисторов. Фирмой было предварительно проведено исследование ряда вариантов транзисторных преобразователей с использованием силовых транзисторов различных фирм 2SD648 фирмы «Тосиба» (Toshiba) на 200 А, 300 В; RSD-751 фирмы EVC на 100 А, 450 В и ряда других; после этого был разработан собственный силовой модуль (Ml-МЗ на рис. 3.5). Этот модуль представляет сборку из двух транзисторов по схеме Дарлингтона и шунтирующего обратного диода.
Параметры силового транзистора по схеме Дарлингтона:
Напряжение коллектор-эмиттер 350В
Напряжение насыщения при токе 200 А 1.6В
Номинальный ток 200 А
Коэффициент усиления по постоянному току при номинальном токе коллектора 250
Время спада тока коллектора 1,2 мкс
Время задержки 2,6 мкс
Два модуля Ml и М2 (рис. 3.5) соединены параллельно, и через них осуществляется импульсное питание якоря двигателя в режиме тяги. При этом в режиме разгона с максимальным ускорением ток достигает 400 А, причем допускаемая силовым преобразователем длительность такого тока составляет 1 мин. Для длительного режима номинальный ток преобразователя составляет 200 А, что согласовано с характеристиками применяемого электродвигателя, имеющего номинальный длительный ток 175 А.
В режиме электрического импульсного торможения якорь двигателя М замыкается транзисторным модулем МЗ, что позволяет иметь максимальный ток якоря при торможении 200 А в течение 1 мин и 100 А длительно. При периодическом замыкании цепи якоря происходит накопление электромагнитной энергии в индуктивностях якоря и добавочных полюсов двигателя, которая затем сбрасывается в аккумуляторную батарею GB по цепям обратных диодов силового преобразователя.
Индуктивность LI предназначена для защиты транзисторных модулей от перенапряжений при коммутации аппаратов в электроприводе. Сброс накопленной в этой индуктивности энергии при отключении цепи под током обеспечивает параллельная защитная цепь из вентиля VI и.резистора. Защита транзисторных модулей от недопустимых режимов при включении и выключении транзисторов производится специальными защитными цепями из конденсаторов CI, С2, вентиля V2 и резисторов Rl, R2. Кроме того, от перенапряжений цепи коллектор-эмиттер защищены диодами Зенера Z1 и Z2.
Транзисторный силовой преобразователь работает при сравнительно высокой частоте переключений. Эта частота непостоянная, а изменяется при изменении скважности, достигая максимальной величины 2000 Гц. Для компенсации индуктивного сопротивления аккумуляторной батареи и проводов монтажа вход силового преобразователя шунтирован батареей конденсаторов Ф суммарной емкостью 1200 мкФ.
Преобразователь возбуждения ПВ осуществляет регулирование тока возбуждения в пределах от 2,0 до 10,6 А при постоянной частоте коммутации выходного транзистора, равной 9500 Гц. Вентили КЗ-V5 служат для защиты выходного транзистора. Вместе с тем некоторые схемные особенности преобразователя ПВ определяются тем, что в электромобиле ETV-1 этот преобразователь выполняет вторую функцию - бортового зарядного выпрямителя. В этом режиме напряжение однофазной сети 115 В подается через мостовой однофазный выпрямитель (на схеме рис. 3.5 не показан) в точки а - плюсом и b - минусом. В цепи заряда тяговой батареи оказывается при этом включенной индуктивность L2, сглаживающая ток заряда батареи. В этом режиме преобразователь ПВ работает с переменной частотой коммутации 5-15 кГц и при регулируемом токе заряда от 2 до 24 А.
Реверсирование электродвигателя производится переключением полярности обмотки возбуждения ОВ с помощью контакторов ВиН.
Управление электроприводом предусматривается с помощью микропроцессора МП по структуре, показанной на рис. 3.5. Педали хода и торможения связаны с задающими потенциометрами, которые определяют сигналы управления тяговым и тормозным моментом. Магнитные датчики тока якоря двигателя ТЯ, тока возбуждения ТВ и тока батареи ТБ совместно с сигналами по напряжению батареи и частоте вращения двигателя ДС участвуют в процессе вычисления момента на валу. Через устройства интерфейса УВ и УТ микропроцессор управляет работой преобразователей питания якоря и возбуждения ПВ в соответствии с заданным тяговым или тормозным моментом. Так как при форсировке тока возбуждения двигателя до 10,6 А частота вращения двигателя составляет 1800 мин-1, то работа преобразователя питания якоря происходит в зоне от этой скорости и почти до нуля. При частоте вращения от 1800 до 5000 мин-1 силовой преобразователь питания якоря находится в режиме насыщения и, кроме того, шунтируется контактором КШ. По этой шунтирующей преобразователь цепи осуществляется и режим генераторного торможения на больших частотах вращения.
Современные конструкции электродвигателей постоянного тока с независимым возбуждением, регулируемым в достаточно широких пределах, создают основу для построения тяговых электроприводов, не имеющих импульсных преобразователей со сложными устройствами принудительной коммутации тиристоров в якорной цепи двигателя. Такие электроприводы разработаны в СССР лабораторией НАМИ, а за рубежом - рядом японских фирм.
0 Бюл. У 1 научно-исследоваут электромашиностронаправлени я вычислит осцепления на т го используют ройства, с по ью которых ые усо сигозбужд а якоря, оложения алам датчиков т ения и углового еско еобх регулирительных о потокосцепления и и возбуждения допол ольных обмоток возб уждения, испо тегральныезуя пропорционально- регуляторы и усилите и токов в тромеханиче з.п. ф-лы,дения генератора икого преобразовател7 ил. СУДАРСТВЕННЫЙ КОМИТЕТО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМРИ ГКНТ СССР ения(56) Вентилъные двигатели и их применение на электроподвижном составе,/ 11 од ред, Б.Н.Тихменева. - М,:Транспорт, 1976, 10-13 с,Авторское свидетельство СССР11 1356134, кл. Н 02 К 29/06, 1985.(54) АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРООБОРУДОВАНИЯ С ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ(57) Изобретение относится к электротехнике, конкретно к регулируемым электрическим машинам переменного Тока при работе их от преобразователей частот, и может быть использовано в системах электропривода и электроснабжения транспортныхсредств, Цель изобретения - уменьшение пульсаций вращающего моментавентнльного электродвигателя, улучшение энергетических, динамических,массогабаритных показателей и расширение диапазона регулирования частоты вращения. Индукторы генератораи электромеханического преобразователя вентильного электродвигателяснабжаются дополнительными продольными обмотками возбуждения, токкоторых регулируется так, чтобы проекция регулируемой части векторапотокосцепления возбуждения по продольной оси на направление, ортогональное вектору тока якоря, былапропорциональна проекции асинхронносоставляющей вектора основного пото енератора и электромеханипреобразователя вычисляютмый заноя изменения основн1534662 Составитель А. Санталов Редактор В. Петраш Техред И.Ходанич Корректор И. Кучерява одписн ул. Гагарина Производственно-издательский комбин тент, г, Уж Заказ 52 Тираж 435 ВНИПИ Государственного комитета по изоб 113035, Москва, Ж, Раетениям и открытиям при ГКНТ СССушская наб д. 4/5нальны тригонометрическим функциямположения их роторов, Каждая фазакольцевой обмотки 19 якоря генератора 1 выполнена из двух ветвей,расположенных одна относительно другой на угол 6 /р, и соединенных междусобой дополнительной обмоткой 21 возбуждения, ось которой совпадает сосью полюсов индуктора 20 генератора 1, Дополнительная обмотка 21возбуждения подключена к выходу первого усилителя 13 тока через первыйдополнительный датчик 15 тока, Входпервого усилителя 13 подключен квыходу первого пропорционально-интегрального регулятора 11, первыйвход которого подключен к выходу первого вычислительного устройства 9,а второй вход объединен с первымвходом первого вычислительного устройства 9 и подключен к выходу первого дополнительного датчика 15 тока. Второй двухканальный вход первого вычислительного устройства 9подключен к первому дополнительномувыходу системы 4 управления, а ш -фазный вход этого вычислительногоустройства 9 подключен к выходу шфазиого датчика 17 тока якоря гене. -ратора 1,Каждая фаза кольцевой обмотки 22якоря ЭМП 2 выполнена из двух вет"вей, расположенных одна относительнодругой на угол /р и соединенныхмежду собой своими разноименнымивыводами. Индуктор 23 ЭМП 2 снабжендополнительной обмоткой 24 возбуждения, ось которой совпадает с осьюполюсов индуктора 23 ЭМП 2. Дополнительная обмотка 24 возбужденияЭМП 2 подключена к выходу второгоусилителя 14 тока через второй дополнительный датчик 16 тока. Входвторого усилителя 14 подключен квыходу второго пропорцнонально-.интегрального регулятора 12 тока, первый вход которого подключен к выходу второго вычислительного устройства 10, а второй вход объединен спервым входом второго вычислительного устройства 10 и подключен квыходу второго дополнительного датчика 16 тока. Второй двухканальныйвход второго вычислительного устройства 10 подключен к второму дополнительному выходу системы 4 управле"ния, а ш -фаэный вход.этого вычислительного устройства 10 подключен 3 1534662Изобретение относится к электротехнике, а именно.к регулируемым машинам переменного тока различногоназначения при работе их от преоб 5разователя частоты, и может бытьиспользовано в автономной системеэлектрооборудования (АСЭ) транспортных средств с вентильными электродвигателями. 10Цель изобретения - уменьшениепульсаций вращающего момента, улучшение энергетических, динамическихи массогабаритных показателей и расширение диапазона регулирования частоты вращения вентильного электродвигателя (ВД),На фиг. 1 приведена принципиальная электрическая схема АСЭ с ВД;на фиг, 2 и 3 - векторные диаграммы 20изображающих векторов генератора иэлектромеханического преоьразователя (ЭМП); на фиг, 4 - функциональная схема вычислительного устройства; на фиг, 5 - функциональная схема блока моделирования потокосцеплений якоря; на фиг, 6 - конструктивная схема ЭМП и генератора с дат"чиками углового положения ротора;на фиг. 7 - конструктивная схема ЗОдиска ротора ЭМП и генератора.АСЭ (фиг. 1) содержит 2 р -полюсный ш,-фазный генератор 1 переменного тока и вентильный электродвигатель, включающий в себя 2 р -полюсныйш -фазный ЭМП 2, обмотки якорей которых связаны через преобразователь3 частоты, управляющий вход которого подключен к выходу системы 4 уп"равления (СУ), датчик 5 углового по" 40ложения ротора генератора 1, установленный на оси 6, датчик 7 углового положения ротора ЭМП 2, уста"новленный на оси 8, первое 9 и второе 10 вычислительное устройства, 5два пропорционально-интегральных ре"гулятора 11 и 12 тока, два усилителя 13 и 14 тока, два дополнительныхдатчика 15 и 16 тока, ш -фазныйдатчик 17 тока якоря генератора 1, 5 Ош -фаэный датчик 18 тока якоря ЭМП 2,СУ 4 снабжена двумя дополнительными выходами, входами для регулирования угла запаздывания и угла опе"режения и информационными входами,подключенными соответственно к выходам датчиков 5 и 7 углового положения роторов генератора 1 и ЭМП 2,выходные сигналы которых пропорцио(2) 50где 6,55"с 1 д фХ 5 1к выходу щ, -фазного датчика 18 токаякоря ЭМП 2,Каждое вычислительное устройство9 и 1 О (фиг, 4) включает в себя двакоординатных преобразователя 25 и26, блок 27 моделирования потокосцеплений якоря, блок 28 выделениясреднего значения, блок 29 суммирования, блок 30 деления, выход которого является выходом вычислительныхустройств 9 и 10, а вход делимогоподключен к выходу блока 29 суммирования, первым входом соединенногос выходом блока 28 выделения среднего значения. Вход блока 28 соединенс вторым входом блока 29 суммирования и с выходом второго координатного преобразователя 26, первый ивторой входы которого соединены сопервым и вторым выходами блока 27моделирования потокосцеплений якоря,первым и вторым входами соединенногос первым и вторым выходами первогокоординатного преобразователя 25,третьим входом - с источником эквивалентного сигнала, а четвертый входблока 27 моделирования является первым входом вычислительного устройства 9 и 1 О. Вход делителя блока 30деления, третий вход второго координатного преобразователя 26, первыйвход первого координатного преобразователя 25 объединены и представляют собой первый канал второго двухканального входа вычислительногоустройства 9 и 10, Четвертый входвторого координатного преобразователя, 26, второй вход первого координатного преобразователя 25 объединены и представляют собой второй канал второго двухканального входа вычислительных устройств 9 и 1 О, а щ 1 фаэный или щ -фазный вход первогокоординатного преобразователя 25 является щ-фазным или щ -фазным входами вычислительных устройств 9 и 10.В АСЭ при фазовом регулировании напряжения генератора 1 и напряженияЭМП 2 эквивалентный выпрямленный ток(модуль вектора тока якоря) ЭМП 2содержит, кроме постоянной составляющей, переменные составляющие тока, которые и являются причинойпульсации вращающего момента и ухудшения энергетических показателей ВД.Кроме того, вращающий момент ВД является пульсирующим даже при идеально сглаженном эквивалентном выпрям 534662 Ьленном токе ЭМП 2 ввиду дискретногохарактера изменения положения векто".ра тока якоря ЭМП 2, что приводитпри низких частотах вращения к явлению шагания ВД, ограничивая теми 1самым диапазон регулирования частотывращения АСЭ с ВД, Дискретный характер изменения положения вектора тока якоря генератора 1 вызывает пульсации электромагнитного момента генератора 1 и приводит к ухудшениюего энергетических показателей,Пульсации эквивалентного выпрямленного тока и момента, обусловленные фазовым регулированием напряжения ЭМП 2 и дискретным характеромизменения вектора тока якоря ЭМП 2,можно устранить, если проекцию век тора основного потокосцепления якоря ЭМП 2 на направление.д, ортогональное вектору току якоря ЭМП 2поддерживать равной ее среднему значению путем регулирования тока возбуждения ЭМП 2 по продольной оси Йд для чего необходимо компенсировать переменную составляющую проекции вектора основного потокосцепления й(3 рд в выражении, электромагнит ного момента (фиг. 2) Мд = (С 1 р д + Ь(ф бд) хд где(б - среднее значение проек ции вектора основногопотокосцепления на направление Ед, ортогональное вектору тока якоряЭМП 2 д,40 Из диаграммы изображающих векторов(фиг, 2) необходимая величина потокосцепления дополнительной обмотки24 возбуждения ЭМН 2 по продольнойоси й определяетсяЧ,1 Д =ЦУ д/совъ+ 12нп6 оугол опережения включения при холостом ходе, определяемый установкой датчика 7 углового положения ротораЭМП 2;ток возбуждения и индуктивное сопротивление рассеяния дополнительной продольной обмотки 24 возбуядения ЭМП 2.где и - среднее значение проек обгции вектора основного потокосцепления на направление Гг, ортогональноевектору тока якоря генератора 1Из диаграммы изображающих векторов (Фиг. 3) необходимая величина потокосцепления дополнительной обмотки 21 возбуждения генератора 1 по продольной оси й определяется так: 30 3569,1,= Й(/сов С, + 61(4) Гф.где сг оЫ - угол запаздывания включенияпри холостом ходе, определяемый установкой датчика5 углового положения роторагенератора 1; 11 йгХ - ток возбуждения и индуктиво 1 гное сопротивление рассеяниядополнительной продольнойобмотки 21 возбуждения генератора 1,Диаграммы изображающих векторов(Фиг. 2 и 3) для простоты рассмотрения построеныдля углов коммутациитока в Фазах ЗМП 2 и генератора 1,равных Фг1 = 0 (принудительнаякоммутация), При наличии углов коммутации вычислительные устройства 9и 10 определяют проекции переменных 50 Аналогично можно устранить пульсации эквивалентного выпрямленного. тока и момента, обусловленные Фазовым регулированием напряжения генератора 1 и дискретным характером5 изменения вектора тока якоря генератора 1. Для этого проекцию вектора основного потокосцеппения якоря генератора 1 на направление Е, ортого нальное вектору. тока якоря генератора 1 1 , необходимо поддерживать равной ее среднему значению путем регулирования тока возбуждения генератора 1 по продольной оси й, для 15 чего необходимо компенсировать переменную составляющую проекции вектора основного потокосцепления Ь 55 г в выражении электромагнитного момента (Фиг, 3): составляющих основного потокосцепления Ь, 6 (1с учетом их амплитуд и Фаз на коммутационном интервале, При этом регуляторы 11 и 12 тока позволяют с достаточной для практики точностью поддерживать как в статике, так и в динамике проекции векторов основного потокосцепления р о4 на уровне, соответствующем их средним значениям, включая и коммутационные интервалы, Первые слагаемые в выражениях (2) и (4) Формируются с помощью вычислительных устройств 9 и 10, выходные сигналы которых подаются на первые входы пропорционально-интегральных регуляторов 11 и 12 тока, на вторые входы которых подаются сигналы, пропорциональные токам возбуждения дополнительных продольных обмоток 21 и 24 возбуждения генератора 1 и ЭМП 2, Масштабные козФФициенты на входах регуляторов 11 и 12 выбираются так, что суммарный сигнал определяется выражениями (2) и (4),За счет интегральных составляющих на выходах регуляторов 1 и 12 вырабатывается сигнал, обеспечивающий после усиления усилителями 13 и 14 необходимое напряжение на дополнительных обмотках 21 и 24 возбуждения генератораи ЭМП 2, требуемое для поддержания проекции вектора основного потокосцепления якоря генератоРа 1 и ЭМП 2 (1 г и(1) на УРовне, равном их средним значениям, Выбор соответствующих передаточных Функций регуляторов 11 и 12 тока дополнительных обмоток 21 и 24 возбуждения обеспечивает динамику процесса регулирования возбуждения.Вычислительные устройства 9 и 10 предназначены для определения переменных составляющих проекций векторов основного потокосцепления генератора 1 и ЗМП 1 на оси, ортогональные векторам токов обмоток якоря генератора 1 и ЭМП 2, и моделирования части потокосцеплений дополнительных обмоток 21 и 24 возбуждения генератора 1 и ЭМП 2 согласно выражениям (2) и (4), Для этого применяется первый координатный преобразователь 25, который состоит из типовых множительных и суммирующих элементов и реализует преобразование тока от Фазовых составляющих к продольной и поперечной составляющим по сигналам6210 9 .1 5346 датчиков 17 н 18 и по сигналам датчиков 5 или 7 углового положения роторов генератора 1 или ЭИП 2. Моделирование основных потокосцеплений якоря по осям 6, с 1 осуществляется в блоке 27 моделирования продольной и поперечной составляющих потокосцеплений (Фиг. 5). Нелинейные элементы 31 и 32 имеют одинаковые характеристики и определяют зависимость основного потока у от результирующей намагиичивающей силы 1, т.е. (= = Г, Намагничивающие силы 1, одной половины полюса определяются суммой намагиичивающих сил по продольной и поперечной осям (фиг. 5)МВ 0,5(В + Ю),111 0,5(У, + 11),% адругой половини полюса х - разностью Этим намагиичивакнщим силам соответствуют потокосценления), и ц, т.е.выходы нелинейных элементов 31 и 32 Масштабные коэициенты усилителей33 и 34 выби.аагая так, что суммарные сигнал на выходах этих усилителей определяются выражениями Далее составляющие основного потокосцепления по осям 4, 9 поступают вовторой координатныйпреобразователь26, состоящий иэ типовых множительных и суммирующих элементов и осуществляющий переход из продольной ипоперечной составляющих основногопотокосцепления к составляющей основного потокосцепления(р, ортогональйой вектору тока якоря, по следующему соотношению:В 6 Ч" соз -1 здпС,ь" 1Составляющая основного потокосцепленияподается на вход блока 28выделения среднего значения, на выходе которого получают среднее значение основного потокосцепления о,Блок 28 может быть выполнен в виде 25 за 35 40 4 50 55 интегратора. Переменную составляющую основного потокосцепления А бполучают на выходе блока 29 суммирования как разность составляющихиподаваемых на вход блока 29 суммирования. На выходе блока 30 деления получают сигнал, необходимый для моделирования потокосцепления продольной дополнительной обмотки 2 или 24 возбуждения Генератор 1 и ЭИП 2 (Лиг. 6 и 7) выполнены скомбинированным возбужде" кием, при этом якори генератора 1 и ЭИП 2 содержат ш,-фаэную генератора 1 и т -разную ЭИП 2 кольцевые обмотки 19 и 22, жестко закрепленные на тороидальном магнитопроводе 35, зафиксированном неподвижно относительно корпуса 36 с помощью наружной немагнитной втулки 37, а индукторы 20 и 23 генератора 1 и ЭИП 2 расположены с двух торцовых сторон якоря и состоят из магнитопроводящих секторов 38, образующих многополюсную систему, жестко закрепленных на внутренней и внешней магнитопроводящих втулках 39 и 40, разделенных между собой немагнитной втулкой 41 индукторов 20 и 23 генератора 1 и ЭМП 2.Число магнитопроводащих секторов 38 равно числу полюсов, оси секторов 38, примыкающих к одной стороне якоря, совпадают с осью секторов 38, примыкающих к другой стороне якоря. Внутренняя магеитопроводящая втулка 39 жестко закреплена на валу 42, внешняя магнитопроводящая втулка 40 жестко прикреплена к внутренней магнитопроводящей втулке 39 через не- магнитную втулку 41 индукторов 20 и 23 генератора 1 и ЭИП 2. Нри этом на магнитопроводящих секторах 38 внутренней магнитопроводящей втулки 39, примыкающих к одной стороне якоря, закреплены полюсы 43 из магнито-. твердого материала одной полярности, а примыкающих к другой стороне яко- ря - полюсы 43 из магнитотвердого материала другой полярности, на магнитонроводящих секторах 38 внешней магнитопроводящей втулки 40 закреплены полосы 44 из магнитомягкого материала.Дополнительные обмотки 21 и 24 генератора 1 и ЭИП 2 выполнены в ви 1534662 12де цилиндрической катушки 45, закрепленной неподвижно относительно сектора через внутреннюю немагнитную втулку 46 и расположенной в пространстве, ограниченном внутренним диамет" ром кольцевых обмоток 19 и 22 генератора и ЭИП 2 и наружным диаметром внешней магнитопроводящей втулки 40, с торцов обмотки 21 и 24 возбуждения генератора 1 и ЭМП 2 примыкают через рабочий зазор к внутренним торцовымповерхностям магнитопроводящих секторов 38. К наружной торцовой поверхности магнитопроводящих секторов 38одной активной стороны индукторов 20и 23 генератора 1 и ЭМП 2, напримерправой, прикреплен ротор 47 датчикауглового положения, выполненного ввиде бесконтактного синусно-косинусного вращающегося трансформатора дискового типа с кольцевыми высокочастотными трансформаторами 48, статор 49 которого закреплен на внутренней торцовой поверхности подшипникового щита 50.Принцип действия электрических манин синхронного типа с комбинированным возбуждением известен, Лучшееиспользование активного объема машины достигается в машинах за счет второй активной стороны катушки статора. При этом улучшается тепловое состояние машины, так как увеличивается теплоохлаждающая поверхность обмоток статора. Дополнительная обмотка возбуждения машины, почти не увеличивая занимаемого машиной объема, приводит к образованию дополнительного электромагнитного момента, причем этот момент изменяется по величине в соответствии с сигналом управления. Наличие двух магнитопроводящих контуров (контура магнитоэлектрического типа и контура электромагнитного типа) позволяет осуществлять независимое электромеханическоп преобразование с суммированием электромагнитных моментов на общем валу. Расширение функциональных возможностей в электрических машинах такого типа позволяет использовать их как в качестве генераторов с регулируемым напряжением, так и в качестве двигателей, управляемых по моменту и частоте вращения,Формула изобретения1, Автономная система электрооборудования с вентильным электродвигателем, содержащая 2 р -полюсныйш,-фазный генератор переменного токаи вентильный электродвигатель, включающий в себя 2 р -полюсный ш -фазный 5электромеханический преобразователь,обмотки якорей которых выполнены покольцевой схеме и связаны через преобразователь частоты, управляющийвход которого подключен к выходу системы управления, снабженной входамидля регулирования угла запаздыванияи угла опережения и информационными входами, подключенными соответственно к выходам датчиков угловогоположения ротора электромеханического преобразователя и генератора,п 1,-фазный датчик тока якоря генератора и ш-фазный датчик тока якоряэлектромеханического преобразователя, отличающаяся тем,что, с целью уменьшения пульсацийвращающего. момента, улучшения энергетических, динамических, массогаба ритных показателей и расширения диапазона регулирования частоты вращения, в нее дополнительно введеныпервое и второе вычислительные устройства, два пропорционально-интегральных регулятора тока, два усилителя тока и два дополнительных датчика тока, система управления снабжена двумя дополнительными выходами,а индуктор электромеханического пре"образователя и индуктор генератораснабжены дополнительной обмоткой возбуждения, каждая ось которой совпадает с осью полюсов соответствующегоиндуктора, обмотки якоря генератора 40 и электромеханического преобразователя выполнены кольцевыми, каждаяфаза обмоток якоря электромеханичес"кого преобразователя и генераторавыполнена из двух ветвей, располо"женных одна относительно другой наугол й/р у генератора и Ф/р уэлектромеханического преобразователяи соединенных между собой своими1разноименными выводами, дополнитель"ная обмотка возбуждения генератораподключена к выходу первого усилителя тока через первый дополнительный датчик тока, вход первого усилителя подключен к выходу первого пропорционально-интегрального регулятора, первый вход которого подключенк выходу первого вычислительногоустройства, а второй вход объединенс первым входом первого вычислитель 13141534 ЬЬ 2ного устройства и подключен к выходу первого дополнительного датчика тока, второй двухканальный вход первого вычислительного устройства под 5 ключен к первому дополнительному выходу системы управления, а ш 1-фазный вход этого вычислительного устройства подключен к выходу ш,-фазного датчика тока якоря генератора, дополнительная обмотка возбуждения электромеханического преобразователя подключена к выходу второго усилителя тока через второй дополнительный датчик тока, вход второго усилителя подключен к выходу второго пропорционально-интегрального регулятора, первый вход которого подключен к выходу второго вычислительного устройства, а второй вход объединен с первым входом второго вычислительного устройства и подключен к выходу второго дополнительного датчика тока, второй двухканальный вход второго вычислительного устройства подклю чен к второму дополнительному выходу системы управления, а ш -фазный вход этого вычислительного устройства подключен к выходу ш -фазнЬго датчика тока якоря электромеханического преобразователя, причем каждое вычислительное устройство включает в себя два координатных преобразователя, блок моделирования потокосцеплений якоря блок выделения среднего знаЭ35 чения, блок суммирования, блок деления, выход которого является выходом вычислительного устройства, а вход делимого подключен к выходу блока суммирования, первым входом соединенного с выходом блока выделения среднего значения, вход которо,го соединен с вторым входом блока суммирования и выходом второго координатного преобразователя, первый н второй входы которого соединены с первым и вторым выходами блока моделирования потокосцеплений якоря, первым и вторым входами соединенного с первым и вторым выходами первого координатного преобразователя, тре 50 тьим входом - с ис точником зкв ив алентного сигнала, а четвертый вход блока моделирования является первым входом вычислительного устройства, вход делителя блока деления, третий вход второго координатного преобразователя и первый вход первого координатного преобразователя объедине" ны и представляют собой первый каналвторого двухканального входа вычислительного устройства, четвертыйвход второго координатного преобразователя, второй вход первого координатного преобразователя объединены и представляют собой второй каналвторого двухканального входа вычислительного устройства, а ш -фазныйвход первого координатного преобразователя является ш -фазным входомвычислительного устройства. 2. Система по и. 1, о т л и ч а - ю щ а я с я тем, что генератор и электромеханический преобразователь выполнены с комбинированным возбуждением, при этом кольцевые обмотки якоря генератора и электромеханического преобразователя, жестко закреплены на тороидальном магнитопроводе, зафиксированном неподвижно относительно корпуса с помощью наружной немагнитной втулки, а индуктор расположен с двух торцовых сторон якоря и состоит из магнитопроводящих секторов, образующих многополюсную систему, жестко закрепленных на внутренней и внешней магнитопроводящих втулках, разделенных между собой немагнитной втулкой индуктора, число магнитопроводящих секторов равно числу полюсов, оси секторов, примыкающих к одной стороне якоря, совпадают с осью секторов, примыкающих к другой стороне якоря, внутренняя магнитопроводящая втулка жестко эак" реплена на валу, внешняя магнитопроводящая втулка жестко прикреплена к внутренней маГнитопроводящей втулке через немагнитную втулку индуктора, на магнитопроводящих секторах внутренней магнитопроводящей втулки, примыкающих к одной стороне якоря, закреплены полюсы из магнитотвердого материала одной полярности, а примыкающих к другой стороне якоряполюсы из магнитотвердого материала другой полярности, на магнитопроводящих секторах внешней магнитопроводящей втулки закреплены полюсы из магнитных материалов, дополнительная обмотка возбуждения выполнена в виде цилиндрической катушки и расположена в пространстве, ограниченном внутренним диаметром кольцевой обмотки ста" тора и наружным диаметром внешней магнитопроводящей втулки индуктора, 15. 1534662а с торпов обмотка возбуждения примькает через рабочий зазор к ннутренним торцовым поверхностям магнитопроводящих секторов.
Заявка
4275862, 18.05.1987
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ЭЛЕКТРОМАШИНОСТРОЕНИЯ
ЕВСЕЕВ РУДОЛЬФ КИРИЛЛОВИЧ, САЗОНОВ АРЕФИЙ СЕМЕНОВИЧ
МПК / Метки
Код ссылки
Автономная система электрооборудования с вентильным электродвигателем
Похожие патенты
К рангов приоритетов 4 р содержит третью группу элементов И, группу элементов НЕ и третью группу элементов ИЛИ, причем старший по рангу К -вход узла соединен с его К-выходом,(К)-вход связан с первым входом элемента И третьей группы, выход которого подсоединен к (К) - выходу узла, а второй вход этого элемента И связанс выходом элемента НЕ, вход которого соединен с К входом узла, последующие (К)-входы узла связаны с соответствующими первьми входами элементов И третьей группы, выходы которых являются выходами (К) рангов приоритета узла, а вторые входы этих элементов И третьей 55 группы соединены с выходами элементов НЕ, входы которых связаны с соответствующими выходами элементов ИЛИ третьей группы, входы последних связа" ны с предыдущими...

Исчерпание углеводородного топлива, ухудшение экологической обстановки и ряд других причин рано или поздно заставят производителей разработать модели электромобилей, которые станут доступны для широких слоев населения. А пока остается только ждать или собственноручно разрабатывать варианты экологически чистой техники.
Если же вы все-таки предпочитаете самостоятельно искать решения, а не дожидаться их со стороны, то вам понадобятся знания о том, какие двигатели для электромобиля уже изобрели, чем они отличаются и какой из них наиболее перспективный.
Тяговый двигатель
Если вы решите поставить обыкновенный электромотор под капот своего автомобиля, то, скорее всего, из этого ничего не выйдет. А все потому, что вам необходим тяговый электрический двигатель (ТЭД). От обычных электромоторов он отличается большей мощностью, способностью выдавать больший крутящий момент, небольшими габаритами и малой массой.
Для питания тягового электродвигателя используются батареи. Они могут подзаряжаться от внешних источников («от розетки»), от солнечных батарей, от генератора, установленного в авто, или в режиме рекуперации (самостоятельное восполнение заряда).
Двигатели для электромобилей чаще всего работают от литий-ионных батарей. ТЭД обычно функционирует в двух режимах - двигательном и генераторном. В последнем случае он восполняет потраченный запас электроэнергии при переходе на нейтральную скорость.
Принцип работы
Стандартный электродвигатель состоит из двух элементов - статора и ротора. Первый компонент является неподвижным, имеет несколько катушек, а второй совершает вращательные движения и передает усилие на вал. На катушки статора с определенной периодичностью подается переменный электрический ток, что вызывает появление магнитного поля, которое начинает вращать ротор.

Чем чаще катушки «включаются-выключаются», тем быстрее вращается вал. В двигатели для электромобилей могут устанавливать два вида ротора:
- короткозамкнутый, на котором возникает магнитное поле, противоположное полю статора, за счет чего и происходит вращение;
- фазный - используется для уменьшения тока запуска и контроля скорости вращения вала, является наиболее распространенным.
Кроме того, в зависимости от скорости вращения магнитного поля и ротора двигатели могут быть асинхронными и синхронными. Тот или иной тип необходимо выбирать из имеющихся средств и поставленных задач.
Синхронный двигатель
Синхронный двигатель - это ТЭД, у которого скорость вращения ротора совпадает со скоростью вращения магнитного поля. Такие двигатели для электромобилей целесообразно использовать только в тех случаях, когда имеется источник повышенной мощности - от 100 кВт.

Одной из разновидностей является Обмотка статора такой установки разбита на несколько секций. В определенный момент ток подается на определенную секцию, возникает магнитное поле, которое вращает ротор на определенный угол. Затем ток подается на следующую секцию, и процесс повторяется, вал начинает вращаться.
Асинхронный электромотор
В асинхронном двигателе скорость вращения магнитного поля не совпадает со скоростью вращения ротора. Плюсом таких устройств является ремонтопригодность - запчасти для электромобилей, оснащенных этими установками, найти очень просто. К другим преимуществам относятся:
- Простая конструкция.
- Простота обслуживания и эксплуатации.
- Низкая стоимость.
- Высокая надежность.
В зависимости от наличия двигатели могут быть коллекторными и безколлекторными. Коллектор - устройство, служащее для преобразования переменного тока в постоянный. Щетки служат для передачи электроэнергии на ротор.

Безколлекторные двигатели для электромобилей отличаются меньшей массой, компактными габаритами и более высоким КПД. Они реже перегреваются и потребляют меньше электричества. Единственный минус такого двигателя - высокая цена на электронный блок, который выполняет функции коллектора. Кроме того, найти запчасти для электромобилей, оснащенных безколлекторным двигателем, сложнее.
Производители электродвигателей
Большинство самодельных электромобилей сконструировано с применением коллекторного двигателя. Это объясняется доступностью, низкой ценой и простым обслуживанием.
Видным производителем линейки данных моторов является немецкая компания Perm-Motor. Ее продукция способна к рекуперативному торможению в генераторном режиме. Она активно используется для оснащения скутеров, моторных лодок, легковых автомобилей, электроподъёмных устройств. Если устанавливали в каждый электромобиль, цена их была бы значительно ниже. Сейчас они стоят в пределах 5-7 тыс. евро.

Популярным производителем является компания Etek, которая занимается производством безщеточных и щеточных коллекторных двигателей. Как правило, это трехфазные моторы, работающие на постоянных магнитах. Основные преимущества установок:
- точность управления;
- легкость организации рекуперации;
- высокая надежность за счет простой конструкции.
Завершает список производителей завод из США Advanced DC Motors, выпускающий коллекторные электромоторы. Некоторые модели обладают исключительной особенностью - они имеют второй шпиндель, что можно использовать для подключения на автомобиль-электромобиль дополнительного электрооборудования.
Какой двигатель выбрать
Чтобы покупка вас не разочаровала, надо сравнить характеристики приобретаемой модели с предъявляемыми требованиями к автомобилю. При выборе электродвигателя в первую очередь ориентируются на его тип:
- Синхронные установки имеют сложное устройство и дорогостоящи, но обладают перегрузочной способностью, ими легче управлять, им не страшны перепады напряжения, используются при высоких нагрузках. Они устанавливаются на электромобиль Mercedes.
- Асинхронные модели отличаются низкой стоимостью, простым устройством. Они просты в обслуживании и эксплуатации, однако выделяемая ими мощность намного меньше, чем тот же показатель синхронной установки.
На электромобиль цена будет значительно ниже, если электромотор будет работать в паре с двигателем внутреннего сгорания. На рынке такие комбинированные установки обладают большей популярностью, так как их стоимость составляет около 4-4,5 тыс. евро.
Содержание:Довольно часто возникает ситуация, когда место для строительства частного дома во всех отношениях просто идеальное, но в то же время отсутствует возможность подключения к централизованным . Особенную остроту приобретает вопрос обеспечения электричеством, без которого невозможно нормальное функционирование современных объектов. Поэтому наилучшим выходом из такого положения будут автономные системы электроснабжения, обеспечивающие полную независимость от центральных электрических сетей, без какого-либо ущерба для экологии.
Использование автономных систем обойдется значительно дешевле, чем прокладка новой линии электропередачи, требующая значительных материальных затрат. Автономный источник питания находится в полной собственности хозяина дома. При регулярном техническом обслуживании он сможет эксплуатироваться в течение длительного времени.
Автономные системы электроснабжения частного дома
Автономные инженерные сети широко используются в частных домах. Собственное водоснабжение, канализация и система отопления дают полную независимость от местных коммунальных служб. Гораздо сложнее решается вопрос обеспечения электричеством, однако при правильном подходе с использованием альтернативных источников питания, эта проблема сравнительно легко преодолевается. Существует несколько вариантов автономного электроснабжения, каждый из которых является наиболее подходящим для конкретных условий эксплуатации, в том числе и солнечные системы электроснабжения.
Все автономные системы имеют единый принцип работы, но отличаются первоначальными источниками электроэнергии. При их выборе учитываются различные факторы, в том числе и расходы на эксплуатацию. Например, бензиновые или дизельные генераторы постоянно требуют топливо. Другие же, условно относящиеся к так называемым вечным двигателям, не нуждаются в энергоносителях, а, наоборот, сами способны вырабатывать электричество за счет преобразования энергии солнца и ветра.
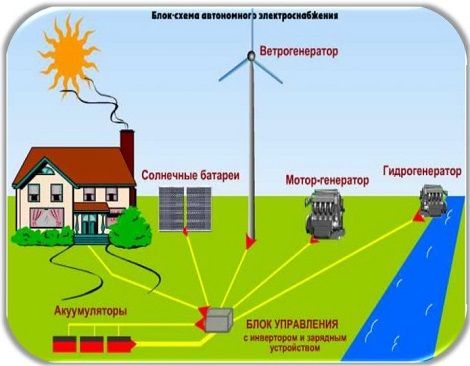
Все автономные источники электроснабжения по большому счету похожи друг на друга своим общим устройством и принципом действия. В состав каждой из них входят три основные узла:
- Преобразователь энергии. Представлен солнечными панелями или , где энергия солнца и ветра преобразуется в электрический ток. Их эффективность во многом зависит от природных условий и погоды в данной местности - от солнечной активности, силы и направления ветра.
- Аккумуляторы. Представляют собой электрические емкости, накапливающие электричество, активно вырабатываемое при оптимальной погоде. Чем больше имеется аккумуляторов, тем дольше сможет расходоваться запасенная энергия. Для расчетов используется среднесуточное потребление электричества.
- Контроллер. Выполняет управляющую функцию по распределению потоков выработанной энергии. В основном эти устройства контролируют состояние аккумуляторных батарей. Когда они полностью заряжены, вся энергия уходит напрямую потребителям. Если же контроллер обнаруживает разрядку батареи, то энергия перераспределяется: она частично уходит потребителю, а другая часть затрачивается на зарядку батареи.
- Инвертор. Устройство для преобразования постоянного тока 12 или 24 вольта в стандартное напряжение 220 В. Инверторы имеют различную мощность, для которой берется суммарная мощность одновременно работающих потребителей. При расчетах необходимо давать определенный запас, поскольку работа оборудования на пределе возможностей приводит к его быстрому выходу из строя.
Существует различное автономное электроснабжение загородного дома, готовые решения которого дополняются различными элементами в виде соединительных кабелей, балластов для сброса лишнего электричества и прочими составными частями. Для правильного выбора агрегата следует более подробно ознакомиться с каждым типом альтернативных источников питания.
Генераторы и мини-электростанции
Генераторные установки и мини-электростанции широко используются и обеспечивают автономное электроснабжение дома, особенно там, где совсем нет централизованных электрических сетей. При условии правильного выбора агрегата, на выходе получается напряжение, способное полностью обеспечить объект электроэнергией. Основным фактором нормальной работы оборудования, является его соответствие электрическим параметрам подключаемых потребителей.

Как правило автономные электростанции выполняют две основные функции. Они служат источником резервного питания на период отключения электроэнергии или снабжают объект электричеством на постоянной основе. Во многих случаях эти устройства обеспечивают подачу напряжения более высокого качества, чем в центральной сети. Это очень важно при использовании высокочувствительной техники, например, газовых отопительных котлов, медицинского оборудования и другой аппаратуры.
Большое значение имеет мощность генераторов, их производительность и возможность продолжительной работы без отключения. Техника с малой мощностью относится к категории электрогенераторов, а более сложные и мощные конструкции считаются уже мини-электростанциями. К устройствам малой мощности относятся генераторы способные выдерживать нагрузку, не превышающую 10 кВт.

Существуют различные типы генераторов, в зависимости от применяемого топлива.
- Бензиновые. Чаще всего используются в качестве резервного источника питания в связи с высокой стоимостью топлива и сравнительно дорогим техническим обслуживанием. Стоимость бензиновых агрегатов значительно ниже других аналогов, что делает их экономически выгодными именно в качестве резервного источника на период отключения основной электроэнергии.
- Дизельные. Обладают значительным моторесурсом, гораздо выше, чем у бензиновых аналогов. Такое оборудование может работать дольше, даже при больших нагрузках. Несмотря на их высокую стоимость, дизельные генераторы пользуются повышенным спросом из-за дешевого топлива и недорогого технического обслуживания.
- Газовые. Надежность и эффективность этих агрегатов вполне может сравниться с бензиновыми и дизельными генераторами. Основным достоинством является их низкая цена и экологическая чистота в процессе эксплуатации.
Каждый агрегат состоит из двигателя и самого генератора. Для более удобной работы все устройства оборудуются замком зажигания, стартером и аккумулятором, розетками для подключения потребителей, измерительными приборами, топливным баком, воздушным фильтром и другими элементами.
Аккумуляторы и источники бесперебойного питания
Одним из вариантов на период отключения электричества в загородном доме являются источники бесперебойного питания. Их применение позволяет решить множество проблем, особенно при кратковременных отключениях электроэнергии. Регулировка питания осуществляется с помощью инвертора и стабилизатора. Использование бесперебойников позволяет сохранить важную информацию на компьютере, которая может быть уничтожена при неожиданном отключении электроэнергии.

В состав входит схема управления и инвертор, являющийся по сути, зарядным устройством. От его мощности зависит время переключения и обеспечение бесперебойного поступления электроэнергии к потребителю. За счет этого обеспечивается автономное электроснабжение загородного дома.
Особая роль отводится стабилизатору, основная функция которого заключается в увеличении или снижении подачи тока, поступающего из основной сети. Поэтому при выборе источника бесперебойного питания следует обязательно учитывать технические характеристики инвертора и стабилизатора. Стандартные устройства оборудуются стабилизатором, способным лишь понижать напряжение.

К положительным качествам ИБП можно отнести их сравнительно невысокую стоимость. Они работают бесшумно и не подвержены нагреву за счет высокого КПД, составляющего 99%. Основным недостатком считается продолжительное переключение на собственное питание. Отсутствует возможность ручной настройки величины напряжения и частоты подачи энергии. Во время работы аккумулятора выход напряжения будет иметь несинусоидальную форму.
Источники бесперебойного питания хорошо зарекомендовали себя совместно с компьютерами и локальными сетями, эффективно поддерживая их работоспособность. Они оказались наиболее оптимальным вариантом для использования именно в этой области.
Электроснабжение частного дома солнечными батареями
В частных и загородных домах все более широкое распространение получают солнечные батареи, используемые в качестве основных или резервных источников питания. Основной функцией этих устройств является преобразование солнечной энергии в электрическую.

Существуют различные способы применения постоянного тока, вырабатываемого солнечными батареями. Он может использоваться напрямую, сразу же после выработки или накапливаться в аккумуляторных батареях и расходоваться по мере необходимости в темное время суток. Кроме того, постоянный ток с помощью инвертора может быть преобразован в переменный ток, напряжением 110, 220 и 380 вольт и применяться для различных групп и типов потребителей.
Вся автономная система электроснабжения на солнечных батареях функционирует по определенной схеме. На протяжении светового дня они производят электроэнергию, которая затем подается к контроллеру заряда. Основной функцией контроллера является управление зарядом аккумуляторов. Если их емкость заполнена на 100%, то подача заряда от солнечных батарей прекращается. Инвертор преобразует постоянный ток в переменный с заданными параметрами. При включении потребителей, этот прибор забирает энергию из аккумуляторов, преобразует ее и направляет в сеть к потребителям.
Солнечная энергия, в зависимости от времен года, не бывает постоянной и не всегда рассматривается в качестве основного источника. Кроме того, объем электроэнергии, потребляемой ежесуточно, тоже изменяется в разные стороны. Поэтому при наступлении полного разряда аккумуляторов, происходит автоматическое переключение системы домашнего электроснабжения с солнечных батарей на другие резервные источники питания или на центральную электрическую сеть.

Солнечные батареи делают хозяев дома абсолютно независимыми от центрального электроснабжения. В этом случае не требуется подводка электрических сетей, исключаются дополнительные траты на оформление разрешительных документов и оплату электроэнергии. Данная система не зависит от перебоев централизованной подачи электричества, на нее не влияет рост тарифов, отсутствуют ограничения в подключении дополнительных мощностей.
Солнечные батареи могут эксплуатироваться в течение длительного периода времени, составляющего 20-50 лет. Серьезные финансовые вложения делаются только один раз, после чего система будет работать и постепенно окупать себя. Вся работа батарей осуществляется на полном автомате. Существенным плюсом является полная безопасность солнечной энергии для человека и окружающей среды. Для получения нужного экономического результата следует правильно выбирать оборудование, монтировать и вводить его в эксплуатацию.
Ветрогенераторные установки
Энергия ветра используется с давних пор. Наглядным примером являются парусные корабли и ветряные мельницы, оставшиеся далеко в прошлом. В настоящее время ветровая энергия стала вновь использоваться для совершения полезной работы.

Типичным представителем этих устройств считается ветрогенератор. Принцип работы агрегата основа на вращении воздушным потоком лопастей ротора, закрепленного на валу генератора. В результате вращения в обмотках генератора создается переменный ток. Он может расходоваться напрямую или накапливаться в аккумуляторах и использоваться в дальнейшем по мере необходимости. Таким образом, обеспечивается автономное электроснабжение объекта.
Кроме генератора, в рабочей цепи имеется контроллер, выполняющий функцию преобразования трехфазного переменного тока в постоянный. Преобразованный ток направляется на зарядку аккумуляторов. Бытовые приборы не могут работать от постоянного тока, поэтому для его дальнейшего преобразования используется инвертор. С его помощью происходит обратное превращение постоянного тока в переменный бытовой ток на 220 вольт. В результате всех преобразований расходуется примерно 15-20% от первоначально выработанной электроэнергии.
Совместно с ветровыми установками могут использоваться солнечные батареи, а также бензиновые или дизельные генераторы. В этих случаях в схему дополнительно включается автоматический ввод резерва (АВР), который производит активацию резервного источника тока, если основной отключается.
Для того чтобы получить максимальную мощность, расположение ветряного генератора должно быть вдоль по направлению ветрового потока. Наиболее простые системы оборудуются специальными флюгерами, закрепляемыми на противоположном конце генератора. Флюгер представляет собой вертикальную лопасть, которая разворачивает все устройство навстречу ветру. В более сложных и мощных установках эта функция выполняется поворотным электромотором, под управлением датчика направления.








